电话:0755-29030191
 东么川服务领域
东么川服务领域
 智能设备制造商
智能设备制造商
东么川品牌服务全国:产品广泛应用于数控机床、医疗设备、纺织印刷、雕刻机、激光打标机、机器人等多个行业服务。
 OMD/OEMD厂家
OMD/OEMD厂家
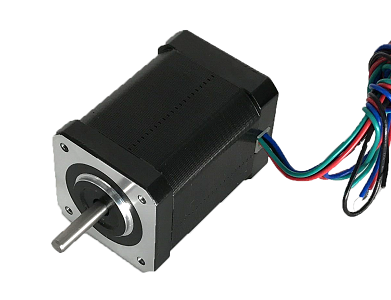
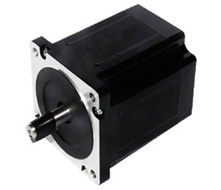
品牌拥有多年的无刷电机以及伺服驱动器研发生产经验,为广大代理商提供优质的步进、无刷电机及伺服驱动器,产品齐全品质保障。
 对外贸易
对外贸易
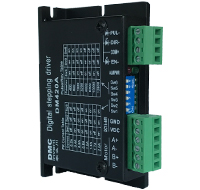
东么川步进驱动器采用国外先进技术生产,为广大经销商、备件提供商能够提供全方位的技术支持他们都选择了与东么川品牌合作。
 生产厂家
生产厂家
东么川拥有600平米的电机生产组装车间,独立自主的研发生产步进驱动器,直流无刷电机等,能够根据客户要求提供个性化批量定制。
 产品中心应用方案
产品中心应用方案
















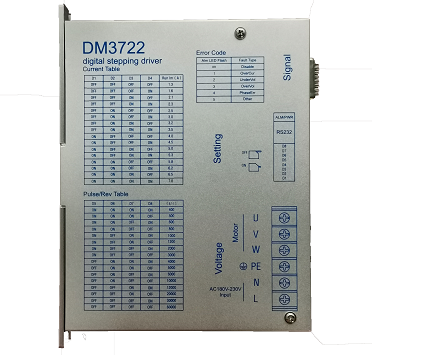
 深圳市东么川伺服控制技术有限公司是一家专门从事伺服控制产品技术研发、生产和销售的高技术厂商,公司拥有一支勇于创新、追求卓越、经验丰富的研发专家团队专注于数字马达控制,经过多年的潜心研发,无论在硬件设计还是软件核心算法技术上取得了重大突破,成为行业少数拥有真正自主技术核心的公司,其中,数字式步进驱动器FD系列及DM系列为自主核心技术成功应用的DSP技术产品,FD系列产品在低速,中速,高速性能方面优于业内各家数字式产品。产品广泛应用于数控机床、医疗设备、纺织印刷、雕刻机、激光打标机、激光内雕机、电子设备、剥线机、包装机械、广告设备、贴标机、恒速应用、机器人等多个行业。公司DM系列产品解决了高速性能及噪声方面问题,响应更快速,成本更低.为客户在低成本应用领域提供了很好的产品。DM系列将直接淘汰传统双极垣流……
深圳市东么川伺服控制技术有限公司是一家专门从事伺服控制产品技术研发、生产和销售的高技术厂商,公司拥有一支勇于创新、追求卓越、经验丰富的研发专家团队专注于数字马达控制,经过多年的潜心研发,无论在硬件设计还是软件核心算法技术上取得了重大突破,成为行业少数拥有真正自主技术核心的公司,其中,数字式步进驱动器FD系列及DM系列为自主核心技术成功应用的DSP技术产品,FD系列产品在低速,中速,高速性能方面优于业内各家数字式产品。产品广泛应用于数控机床、医疗设备、纺织印刷、雕刻机、激光打标机、激光内雕机、电子设备、剥线机、包装机械、广告设备、贴标机、恒速应用、机器人等多个行业。公司DM系列产品解决了高速性能及噪声方面问题,响应更快速,成本更低.为客户在低成本应用领域提供了很好的产品。DM系列将直接淘汰传统双极垣流……
























 地址 ADDRESS
地址 ADDRESS