
深圳市东么川伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
步进电机添加编码器实现绝对定位
发布时间:2022-11-10 09:26:31
步进电机是许多运动控制应用的首选。它们有多种尺寸和额定扭矩可供选择,并且比高端伺服电机便宜得多。因此,让我们谈谈通过添加反馈设备将步进电机性能提高到伺服电机的方法。

带有编码器并像无刷伺服电机一样进行控制的步进电机效率很高……而且比真正的bldc伺服电机便宜。
步进电机的优缺点需要解决
步进电机是无刷直流电动机,它以离散的步长移动,而不是连续扫掠旋转运动。这些步进运动由定子中的电磁线圈组的磁场偏移驱动。步进电机的运行依赖于控制器——一种以驱动步进运动的顺序向电机定子线圈馈送电流的电子设备。控制器的功能对电机性能有重大影响。
有几种类型的步进电机可供选择,但最常见的品种提供良好的分辨率(每转200步或更高)以及可观的低速扭矩、坚固的结构、较长的使用寿命和相对较低的成本。但是,它们确实有局限性。扭矩输出在更高的转速下下降,并且(使用简单的控制器)步进电机可能会受到振铃 - 高频振动。最大的缺点是即使在定位应用中,基本的步进电机系统也在开环控制下运行。
步进电机响应来自控制器的指令以移动一定数量的步数,但不向控制器返回有关此运动是否已完成的反馈。因此,如果电机无法完成请求的步进运动,控制器假定的电机轴旋转位置与真实位置之间可能会出现越来越大的差异。轴(以及任何附加负载或驱动机构)的位置。当电机的扭矩不足以克服机械阻力时,就会发生这种失配……事实上,这些失配在高转速下会成为一个严重的问题,因为那时电机的扭矩输出能力受到限制。这就是设计工程师经常过度指定步进电机的原因——以避免遗漏步骤,即使它为除了最苛刻的运动曲线之外的所有步进电机选择了过大和过重的步进电机。
另一个缺点是,当传统应用的步进电机停止时,电流必须流过电机绕组以将步进电机轴保持在适当位置。这会消耗电能并加热电机绕组和周围的子组件。

大口径空心轴套件编码器适用于空心轴步进电机
反馈步进电机系统以实现可靠定位
将编码器添加到步进电机系统以获取轴位置反馈实质上关闭了控制回路。添加这些反馈设备会增加整体系统成本,但不会像切换到伺服电机那样多。
添加编码器反馈的一种方法是在移动和验证模式下操作。在这种情况下,在步进电机的尾轴上增加了一个简单的增量编码器。然后,当控制器向电机发出步进命令时,编码器会不断向控制器验证命令运动是否已发生。如果电机未能完成请求的步数,控制器可以请求更多的步数,直到电机到达预期位置。更复杂的控制器还增加了进入电机的相电流,以此来增加扭矩以进行这些额外的步骤。
在这种移动和验证设置中使用的编码器通常具有每转200个位置的大约倍数的分辨率。
请注意,采用移动和验证模式的设置可能仍会受益于包含超大电机,但不会超大到简单开环系统所需的程度。
另请注意,此模式可以帮助智能控制器微调进入电机的保持电流,以便在停止期间略微提高效率……尽管总体能耗仍然很高。
带绝对值编码器的闭环步进控制
关键位置控制应用的另一个更复杂的选择是采用多圈绝对值编码器的全闭环控制。此处使用的编码器连接到步进电机的尾轴以监控:
• 步进电机的角位置以及
• 步进电机的整圈数。
在这种配置中,步进电机的控制类似于高极数无刷直流 (bldc) 电机……编码器不断向控制器提供位置反馈。然后,提供给电机的保持电流精确地调整为将位置保持在给定位置公差内所需的量。像无刷伺服电机一样控制的步进电机比真正的 bldc 伺服电机更节能且更便宜。那么,为什么不在所有 bldc 伺服应用中使用低成本步进电机呢?
闭环伺服系统中使用的步进电机具有真正的 BLDC 伺服电机所没有的物理限制。更具体地说,这样操作的步进电机本质上是作为 50 极无刷电机工作的,因此无法达到伺服电机可能达到的转速。此外,步进电机转子比等效功率的真正 bldc 伺服电机具有更高的惯性……因此无法提供相同的加速度。
当步进电机在 bldc 模式下使用时,编码器起着至关重要的换向作用——报告电机轴的准确旋转位置……这反过来又让控制器根据需要为适当的定子电磁铁组通电以进行连续旋转。此外,精密绝对编码器还可以帮助先进的微步控制器微调相电流,以减少更基本的步进电机系统中出现的振铃(振动)。
为基于步进的设计选择正确的编码器
如上所述,当步进电机用于移动和验证模式时,简单的增量编码器会很有效。增量编码器还支持速度控制……尽管步进电机通常不是以稳定速度连续运行的最佳选择。
报告轴的旋转位置的绝对编码器在关键定位轴上表现出色。它们有独立的版本(有自己的封闭外壳和轴)或套件形式。区别如下:
• 独立编码器需要某种形式的耦合器将它们连接到电机轴。
• 相比之下,机器制造商将套件或模块化编码器集成到电机或驱动机构中,以直接从驱动轴测量旋转运动。这些套件编码器可能内置在电机外壳中或连接到电机端罩的外部。
绝对磁性编码器通过一组霍尔效应传感器测量旋转,是步进电机反馈控制的首选。它们以独立和套件形式提供,坚固耐用,对灰尘、湿气和其他污染物相对不敏感……而且易于安装。采用套件形式的磁性编码器包括一个电子封装(安装在一个小型PCB上)以及一个连接到旋转轴上的小型永磁阵列。这些独立式编码器的微型版本(外径低至22mm)可用于特别小的电机。

22毫米磁性套件编码器组件的分解图,适用于特别小的步进电机应用。
多圈磁编码器可以跟踪电机的完成转数。这种编码器可用于控制通过减速齿轮、蜗轮和电缆卷筒驱动负载的电机。这些设备的旋转计数器围绕韦根传感器构建,该传感器检测完整旋转并为计数器电路供电。这可确保旋转计数始终准确,即使在系统电源不可用时发生旋转。

如果最好将旋转测量装置安装在大型电机的驱动端,采用电容测量的空心轴套件编码器可能是一个有用的选择。它们具有多圈测量范围和30和50毫米的中心开口。
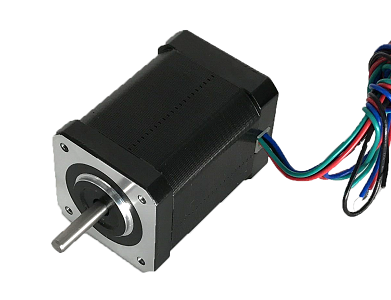
产品推荐:两相步进电机




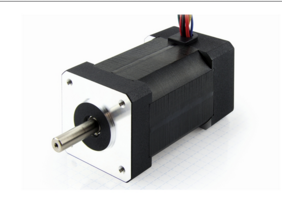
产品推荐:无刷电机







产品推荐:两相步进驱动器



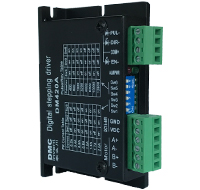



产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS